ing. Andrea Maglie
Il Phantom Omni
Disclaimer: Il contenuto di questo post è un estratto della mia tesi di laurea, realizzata nel 2006. Alcuni esempi potrebbero risultare obsoleti, tuttavia la componente teorica resta un buon riferimento per chi deve approcciarsi alla materia.
Le interfacce Phantom
Lo sviluppo del Personal Haptic Interface Mechanism (Phantom) ha avuto inizio al MIT Artificial Intelligence Laboratory. L’interazione da parte dell’utente avveniva inserendo un dito in un apposito ditale (sistema che poi è stato sostituito dall’uso di uno stilo): il Phantom legge la posizione e in base a questa esercita una forza corrispondente sul dito.
Lo sviluppo del Phantom è basato su tre importanti osservazioni:
-
Le caratteristiche aptiche più importanti sono la forza e il moto. Le informazioni su come un oggetto si muove in risposta ad una forza applicata e le forze che nascono dal tentativo di muoverlo possono essere sufficienti per capire la geometria (forma, posizione), le proprietà (frizione, elasticità) degli oggetti e gli eventi in un ambiente. Le interazioni aptiche, al contrario degli altri tipi di interazioni, permettono uno scambio di dati bidirezionale.
-
Molte interazioni aptiche significative non coinvolgono movimenti di torsione. Tale osservazione ha portato all’uso del ditale, e pertanto il dito dell’utente può essere modellato come un punto o una piccola sfera nell’ambiente virtuale (lo stesso avviene se si usa uno stilo). Tutto ciò semplifica notevolmente sia la programmazione che la progettazione.
-
Uno spazio di lavoro piccolo e centrato sul polso è sufficiente. Molte interazioni aptiche avvengono all’interno dello spazio che può essere coperto dal movimento delle dita, mentre l’avambraccio compie movimenti limitati. Dai risultati di alcuni esperimenti si è deciso di costruire il Phantom in modo tale che un utente possa muovere liberamente il polso senza uscire dallo spazio di lavoro (come avviene per i mouse pad e le tastiere).
Inoltre il design e la progettazione sono state pensate nel rispetto di tre regole fondamentali per garantire una riflessione delle forze corretta ed efficiente:
-
Il movimento libero deve essere avvertito come tale (il dispositivo non deve esercitare forze esterne sull’utente).
-
Gli oggetti virtuali solidi devono essere avvertiti come oggetti rigidi. Il Phantom (nel modello Omni) è in grado di riflettere una rigidità massima di circa 35 N/cm, sufficienti per simulare una resistenza da parte degli oggetti rigidi al tocco.
-
I vincoli virtuali non possono essere violati. Ad esempio non può accadere che, imprimendo una grande forza contro un muro virtuale, l’utente sia in grado di attraversarlo.
Il Phantom Omni è una delle interfacce aptiche più economiche attualmente disponibili sul mercato. Si tratta di un dispositivo aptico ground–based a sei gradi di libertà in input, in grado di leggere la posizione sui tre assi principali \(x\), \(y\) e \(z\) e di computare le forze lungo gli stessi. E’ compatibile con tutti i PC intel–based ed è dotato di una connessione FireWire IEEE-1394a che assicura un trasferimento dei dati ad alta velocità.

Il toolkit OpenHaptics
La programmazione del Phantom Omni avviene tramite il toolkit OpenHaptics di SensAble. Tale toolkit include:
-
HDAPI (Haptic Device API): Costituiscono lo strato di livello più basso per la programmazione aptica; permettono il rendering diretto delle forze e offrono un controllo sulla configurazione in runtime.
-
HLAPI (Haptic Library API): Si appoggiano alle HDAPI per fornire un controllo di più alto livello; risultano familiari a chi già conosce l’OpenGL e sono più facili da usare in quanto il programmatore non deve preoccuparsi di eventi critici come il rendering di equazioni fisiche o la sicurezza dei thread.
Le HDAPI possono essere usate per richiedere le proprietà del dispositivo, come i gradi di libertà in input e output, la forza nominale massima, le dimensioni dello spazio di lavoro. Devono essere utilizzate per inizializzare e configurare l’HHD (haptic device handle) e inoltre possono essere usate per modificare la frequenza del servo loop; il servo loop è il ciclo di controllo usato per calcolare le forze da inviare al dispositivo aptico. Per avere un feedback stabile, il ciclo deve essere eseguito ad una frequenza pari a 1 KHz o superiore (maggiore è la frequenza, maggiore è l’utilizzo di CPU), e pertanto viene eseguito in un thread separato ad alta priorità (servo thread).
Le HLAPI permettono l’aggiunta di effetti personalizzati, ovvero l’aggiunta di forze da inviare al dispositivo aptico. Dato che le forze sono computate nel servo thread, possono essere usate in aggiunta alle callback HLAPI per avere ulteriori informazioni sul dispositivo.
Creazione di un ambiente aptico
Nei dispositivi aptici le forze sono usate per resistere o assistere il movimento del dispositivo stesso. Le interazioni delle forze derivano dal considerare la posizione del dispositivo in relazione agli oggetti presenti nell’ambiente virtuale: se la forza è nulla il movimento del dispositivo è libero. Quando l’utente muove il dispositivo, viene effettuato il rendering delle forze alla frequenza di 1000 Hz, impedendo all’end effector di penetrare la superficie degli oggetti; il modo in cui vengono renderizzate varia a seconda dell’effetto che si deve ottenere sulle superfici (dure, soffici, elastiche, ruvide) o sull’ambiente (come viscosità e inerzia). Un altro effetto desiderato potrebbe essere quello di costringere il movimento del dispositivo lungo un determinato percorso.
Il vettore delle forze è l’unità di output per un dispositivo aptico; le tre classi principali di forze sono:
-
Forze dipendenti dal moto.
-
Forze dipendenti dal tempo.
-
Forze dipendenti sia dalla posizione che dal tempo.
Forze dipendenti dal moto
Una forza è dipendente dal moto quando viene calcolata in base al movimento del dispositivo aptico; tali forze sono:
-
Forza elastica: La forza elastica può essere calcolata usando la legge di Hooke \(F=kx ,\) dove \(k\) è la costante elastica e \(x\) è il vettore della posizione. La molla che rappresenta la forza è attaccata, ad una estremità, ad un punto fisso \(p_0\), solitamente collocato sulla superficie dell’oggetto che l’utente sta toccando, mentre l’altra estremità coincide con la posizione \(p_1\) del dispositivo; il vettore \(x=p_0-p_1\) è orientato in modo tale che la forza elastica sia sempre diretta verso il punto fisso.
-
Frizione viscosa: L’utilità principale della frizione viscosa è ridurre la vibrazione opponendosi al moto; in generale tale forza è proporzionale alla velocità del dispositivo: \(F=-bv\), dove \(b\) è la costante di smorzamento e \(v\) la velocità del dispositivo.
-
Frizione statica: E’ una forza che si oppone alla direzione del moto con modulo costante: \(F=-c\cdot sgn(v) ,\) dove \(v\) è la velocità del dispositivo e \(c\) è la costante di frizione, dipendente dalla forza normale. Può essere utile per creare una transizione smorzata nei cambiamenti di direzione.
-
Frizione dinamica: E’ simile alla frizione viscosa, e pertanto viene calcolata mediante la formula \(F=-bv\), dove \(b\) dipende dalla forza normale.
-
Inerzia: E’ associata alla massa in movimento e si calcola, una volta nota la traiettoria, con la legge di Newton \(F=ma\).
Forze dipendenti dal tempo
Le forze funzioni del tempo possono essere suddivise in:
-
Costanti: Si tratta di forze costanti sia in modulo che in direzione. Possono essere usate per far sentire il dispositivo più pesante oppure, al contrario, più leggero effettuando una compensazione della forza di gravità.
-
Periodiche: Derivano dall’applicazione di un pattern (dente di sega, onda quadra, sinusoide) che si ripete nel tempo. Una forza periodica è descritta da una direzione, da una costante di tempo che controlla il periodo del pattern e un’ampiezza che determina quanto forte dovrà essere la forza al suo picco massimo.
-
Impulsive: Sono costituite da un vettore delle forze che viene applicato istantaneamente; nella pratica, un impulso con un dispositivo aptico è applicato su un piccolo intervallo di tempo.
Contatti e vincoli
Simulare contatti con un oggetto virtuale significa computare le forze che impediscono all’end–effector del dispositivo di penetrare la superficie dell’oggetto virtuale. Ciò può essere simulato tramite il concetto di proxy che segue la trasformazione dell’end–effector nell’ambiente virtuale.
Il proxy è identificato con un punto, una sfera o un insieme di punti; se si tratta di un punto lo definiamo SCP (surface contact point o punto di contatto di superficie.
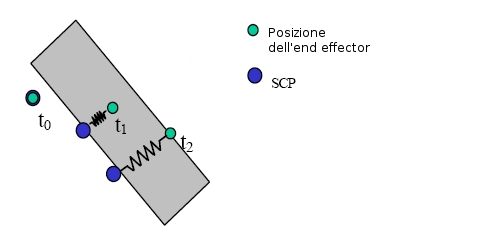
Quando l’end–effector penetra la superficie, viene calcolata una trasformazione del proxy che raggiunga la configurazione ad energia minima tra la superficie di contatto e l’end–effector. Successivamente vengono determinate le forze che impediscono al moto del dispositivo di penetrare ulteriormente la superficie, usando un controllo di elasticità–smorzamento; più precisamente, il punto SCP è un punto che segue la posizione dell’end–effector pur essendo costretto a restare sulla superficie dell’oggetto. Nello spazio libero l’SCP si trova nella stessa posizione dell’end–effector (\(t_0\) in figura); al momento del contatto con un oggetto l’SCP può essere calcolato muovendo l’ultimo SCP verso la posizione dell’end–effector senza oltrepassare la superficie. La forza viene calcolata simulando una molla collegata da un lato all’SCP e dall’altro alla posizione dell’end–effector: in figura \(t_1\) indica la penetrazione nell’oggetto e \(t_2\) mostra una penetrazione ulteriore (la molla è maggiormente allungata facendo sentire una maggiore resistenza all’utente).
Sincronizzazione
La sincronizzazione è importante quando l’interfaccia utente è composta sia di una parte grafica che di una parte aptica, in quanto i due cicli di rendering devono accedere alle stesse informazioni; ciò implica la creazione di copie dei dati in memoria, resi così disponibili in modo sicuro ad entrambi i thread. Non può essere usata la mutua esclusione in primo luogo perché il ciclo di rendering aptico deve sempre girare ad una frequenza di 1000 Hz e non può quindi attendere altri processi, in secondo luogo perché la diversa frequenza dei due cicli facilita la presenza di inconsistenze se sono in movimento più oggetti contemporaneamente.
Anche nella gestione degli eventi il ciclo di rendering aptico deve avere la maggiore priorità. Quando si verifica un evento (come il tocco di una superficie o l’applicazione di un particolare vincolo), questo viene prima gestito dal thread aptico, in modo da fornire una risposta al dispositivo immediata, e poi accodato dal thread grafico che si occuperà di aggiornare la visualizzazione sullo schermo al successivo frame.
Convenzioni nell’interfaccia grafica e aptica
-
Pozzo di gravità: Il pozzo di gravità viene usato per attirare il dispositivo verso un determinato punto, solitamente indicato come vincolo istantaneo. Al pozzo è associato un raggio di influenza: quando il dispositivo si trova all’interno di tale raggio, viene applicata una forza che lo attira verso il centro del pozzo (solitamente viene usata una forza elastica).
-
Trasformazioni relative: I dispositivi aptici hanno una posizione assoluta, dal momento che si trovano ancorati al tavolo di lavoro. L’unico modo per ottenere una manipolazione relativa è applicare delle trasformazioni addizionali alle coordinate del dispositivo, così da dare l’impressione che quest’ultimo si stia muovendo relativamente ad una data posizione e orientazione.
-
Accoppiamento delle informazione aptiche e visive: Il senso aptico del contatto può essere migliorato fornendo una rappresentazione visuale del contatto stesso; ciò si ottiene semplicemente dando una corretta visuale. Ad esempio, la sensazione di contatto sarà più verosimile se il cursore non penetra mai la superficie (rappresentando quindi il proxy e non la posizione del dispositivo).
-
Stabilizzazione della manipolazione con la frizione: Applicare una piccola frizione aiuta l’utente a stabilizzare la mano mentre cerca di arrivare alla posizione desiderata; senza frizione, il dispositivo è troppo “libero”, rendendo difficile effettuare posizionamenti precisi.
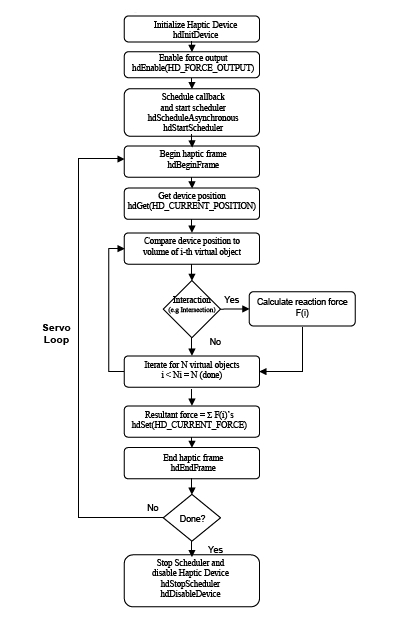
Programmare con le HDAPI
Le Haptic Device API consistono di due componenti: le API relative al dispositivo e quelle relative allo scheduler. Le prime si occupano dell’astrazione di ogni meccanismo tridimensionale supportato. Le API dello scheduler invece permettono di introdurre dei comandi che verranno eseguiti all’interno del servo loop thread. Il tipico uso delle HDAPI prevede l’inizializzazione del dispositivo e dello scheduler, l’avvio di quest’ultimo, l’esecuzione di alcuni comandi tramite lo scheduler stesso e l’uscita. Ad esempio, consideriamo la creazione di un piano che respinga il dispositivo quando questo cerca di penetrarlo; la creazione di tale ambiente si divide in 5 passi:
-
Inizializzazione del dispositivo.
-
Creazione delle callback dello scheduler che chiedono la posizione del dispositivo e comandano la forza che deve respingere il dispositivo al momento della penetrazione.
-
Abilitazione delle forze del dispositivo.
-
Avvio dello scheduler.
-
Reset del dispositivo e dello scheduler quando l’applicazione viene terminata.
Le routine relative al dispositivo possono essere raggruppate come segue:
-
Inizializzazione del dispositivo (creazione dell’handle del dispositivo, abilitazione delle forze, calibrazione).
-
Sicurezza del dispositivo (controllo della sicurezza del force feedback, come temperatura dei motori, forze e velocità eccessive).
-
Stato del dispositivo (richiesta di posizione, velocità, pulsanti e matrici di trasformazione).
Operazioni del dispositivo
Le operazioni di dispositivo sono tutte quelle inerenti la richiesta e l’impostazione dello stato corrente; sono tutte operazioni che dovrebbero essere eseguite esclusivamente all’interno del servo loop utilizzando le callback dello scheduler.
-
Inizializzazione: Sia il dispositivo che lo scheduler devono essere inizializzati prima dell’uso; al momento dell’inizializzazione le forze sono disattivate, verranno invece attivate nel momento in cui verrà fatto partire lo scheduler. Se vengono utilizzati più dispositivi, ognuno deve essere inizializzato separatamente, mentre viene avviato un solo scheduler.
-
Dispositivo corrente: Nel caso in cui vengano utilizzati più dispositivi, uno deve essere impostato come il dispositivo corrente; per fare ciò viene usato il comando
mdMakeCurrentDevice(hHD). Nell’utilizzo di un singolo dispositivo tale comando non deve mai essere utilizzato. -
Caratteristiche del dispositivo: Alcune caratteristiche del dispositivo possono essere abilitate o disabilitate a seconda delle necessità, usando i comandi
hdEnableehdDisable. Tali istruzioni devono essere utilizzate con attenzione e sempre tramite callback dello scheduler.
Frame aptici
I frame aptici definiscono i limiti all’interno dei quali lo stato del dispositivo è consistente. All’avvio del frame, lo stato del dispositivo viene aggiornato e memorizzato per l’uso in quel frame; successivamente tutte le operazioni dovrebbero essere eseguite all’interno dello stesso frame, dato che cercando di ottenere lo stato del dispositivo al di fuori del frame si può ottenere invece lo stato del frame precedente. Ad ogni istante lo scheduler dovrebbe avere un solo frame attivo per ogni dispositivo; tuttavia i frame per dispositivi diversi possono essere annidati.
Operazioni dello scheduler
Come già detto, lo scheduler si occupa della gestione del servo loop thread e opera ad una frequenza di circa 1000 Hz; diventa perciò pericoloso accedere manualmente alle variabili: per fare ciò conviene sempre utilizzare le callback. Le chiamate allo scheduler sono di due tipi:
-
Chiamate sincrone: Ritornano solamente quando sono complete, e il thread deve attendere il completamento prima di continuare. Sono usate principalmente per richiedere lo stato del sistema.
-
Chiamate asincrone: Ritornano non appena sono state schedulate. Sono usate per rappresentare un effetto aptico e perciò risiedono nello scheduler, applicando l’effetto ad ogni iterazione. Al momento della schedulazione di una callback asincrona viene restituito un handle che può essere riutilizzato successivamente per eseguire operazioni sulla callback, come l’eliminazione della stessa dallo scheduler o il suo blocco fino al completamento.
Tutte le callback hanno associata una priorità, in base alla quale viene determinato l’ordine di esecuzione all’interno dello scheduler; per ogni ciclo di scheduler viene eseguita sempre ogni callback. In ogni momento viene eseguito un solo thread di schedulazione e, se sono presenti più dispositivi, questi condividono lo stesso thread.
Stato del sistema
Ottenimento dello stato
Lo stato del dispositivo (assieme ad altre informazioni) può essere
richiesto tramite l’uso delle funzioni della famiglia hdGet, come ad
esempio hdGetDoublev. Tali funzioni richiedono un parametro valido ed
un singolo indirizzo di ritorno o un array. Le richieste possono essere
fatte al frame corrente o al precedente; in generale, se vengono
eseguite all’esterno di un frame, vengono riferite a quello precedente.
Per i parametri di forze in output il valore viene impostato a zero
automaticamente all’inizio di ogni frame.
Impostazione dello stato
L’impostazione dello stato deve essere sempre eseguita all’interno di uno stesso frame, ed è necessario passare il numero corretto di parametri; questo per evitare l’introduzione di errori dato che si va a modificare le caratteristiche o il comportamento del dispositivo. Le forze non vengono inviate al dispositivo fino alla fine del frame, quindi se viene impostato due volte lo stesso stato, la seconda impostazione sostituisce la prima (se ad esempio si vogliono sommare più forze, sarà necessario farlo in una variabile separata).
Sincronizzazione dello stato
Lo scheduler fornisce una sincronizzazione dello stato tra thread diversi. Un esempio è costituito dal caso in cui uno stato deve essere aggiornato alla frequenza del servo loop, e contemporaneamente un altro thread (come il thread grafico) accede e modifica lo stato. E’ possibile ottenere lo stato attuale da un singolo frame all’interno del ciclo aptico usando le callback sincrone.
Programmare con le HLAPI
Le HLAPI sono delle API in C di alto livello per il rendering aptico e si accompagnano alle API OpenGL per il rendering grafico. Le HLAPI permettono al programmatore di specificare primitive geometriche come triangoli, linee e punti assieme a proprietà aptiche come frizione e rigidità; tramite tali informazioni il motore di rendering aptico calcola poi le forze appropriate. Inoltre queste API permettono sia di impostare che di richiedere lo stato degli oggetti, richiedere lo stato del Phantom (posizione e orientamento) e impostare le funzioni di callback.
Generazione delle forze
Esistono tre modi per generare un feedback aptico usando le HLAPI:
-
Rendering delle forme: Permette di specificare primitive geometriche (tramite istruzioni OpenGL) che il motore di rendering usa per computare le giuste forze di reazione per simulare il tocco della superficie. L’identificazione delle geometrie create in OpenGL può avvenire in due modi: tramite il depth buffer oppure tramite il feedback buffer.
-
Rendering degli effetti: Permettono di specificare forze globali non definibili tramite primitive geometriche (cioè non legate al tocco di una figura geometrica).
-
Rendering diretto del proxy: Permettono di impostare un orientamento per il dispositivo aptico il quale verrà portato nella giusta posizione dal motore di rendering.
Threading
Dato che il rendering aptico necessita di un aggiornamento molto più frequente rispetto all’applicazione grafica, il motore HLAPI crea due thread in aggiunta a quello dell’applicazione principale: il servo thread e il collision thread.
-
Servo thread: Gestisce la comunicazione diretta con il dispositivo aptico, leggendo la posizione e l’orientamento del dispositivo e aggiornando le forze ad una frequenza molo alta (generalmente 1000 Hz). La differenza rispetto alle HDAPI è che le HLAPI nascondono il servo thread all’utente.
-
Collision thread: Determina quali primitive geometriche sono in contatto con il proxy ad una frequenza di 100 Hz (minore rispetto al servo thread ma maggiore del client thread). Una volta determinato quale oggetto è in contatto con il proxy, viene elaborata un’approssimazione della forma locale dell’oggetto, la quale viene inviata al servo thread che la utilizza nel calcolo delle forze.
Struttura della programmazione con le HLAPI
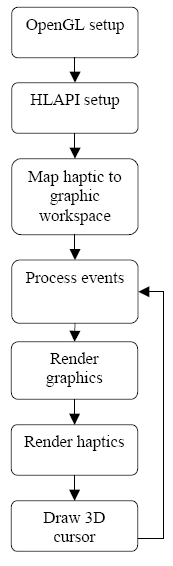
In figura si può vedere la struttura tipica di un programma che implementa le HLAPI. Il primo passo è l’inizializzazione dell’ambiente OpenGL con la creazione di un contesto grafico e la rispettiva finestra; segue l’inizializzazione delle HLAPI con la creazione del contesto aptico. Successivamente viene specificato come le coordinate fisiche (quelle del Phantom) devono essere mappate nello spazio delle coordinate usato dall’ambiente grafico. A questo punto è possibile effettuare il rendering grafico e inizia la cattura degli eventi aptici, procedendo così con il rendering aptico; in aggiunta viene rappresentato un cursore tridimensionale in corrispondenza della posizione del proxy. Il ciclo prosegue tornando alla cattura degli eventi.
Setup del dispositivo
Come con le HDAPI, l’inizializzazione del dispositivo avviene tramite il
comando hdInitDevice, seguito dal comando hlCreateContext, il quale
crea il contesto aptico. Infine il contesto viene impostato come
corrente con l’istruzione hlMakeCurrent (ciò è richiesto da tutti i
comandi delle HLAPI). Il rendering del contesto deve essere attivo per
un solo thread alla volta, in quanto le routine HLAPI, come quelle
OpenGL, non sono thread safe; ciò può essere implementato con l’uso di
un mutex per sincronizzare le chiamate a hlMakeCurrent per i
contesti condivisi.
Frame aptici
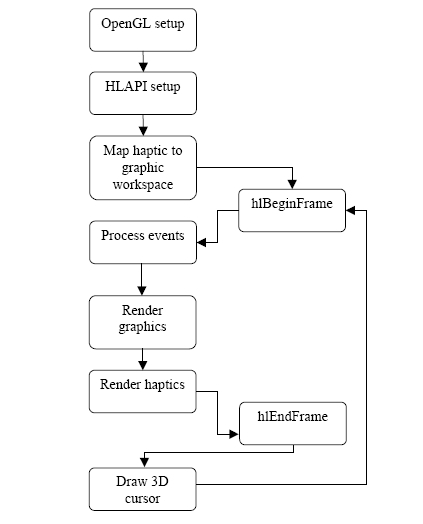
Tutti i comandi implementati dalle HLAPI devono essere inseriti
all’interno di un frame aptico, delimitato dalle chiamate a
hlBeginFrame (posta all’inizio del ciclo di rendering) e hlEndFrame
(alla fine del ciclo di rendering), come evidenziato in
1.4{reference-type=”ref” reference=”fig:hlapiframe”}.
In generale sarà presente un frame aptico per ogni frame grafico. Ciò è
molto diverso rispetto alla programmazione con le HDAPI, perché in
questo caso il frame grafico viene aggiornato alla stessa frequenza di
quello aptico: le chiamate avvengono nel thread dato che entrambi
accedono alle medesime informazioni geometriche. hlBeginFrame campiona
lo stato corrente del rendering aptico dal thread aptico;
successivamente hlEndFrame aggiorna la posizione del proxy in base ai
cambiamenti nella dinamica degli oggetti. In aggiunta hlBeginFrame si
occupa di aggiornare le coordinate globali usate dal motore di rendering
aptico. Tutte le richieste dello stato del dispositivo o del proxy
effettuate all’interno di uno stesso frame riportano lo stesso
risultato, ovvero lo stato presente al momento in cui è stato richiamato
hlBeginFrame. Alla fine del frame, tutti i cambiamenti allo stato che
sono intervenuti vengono trasmessi al rendering aptico. Ciò fa si che
più cambiamenti allo scenario all’interno di uno stesso frame vengano
trasmessi ai cicli aptico e grafico simultaneamente alla fine del frame.
Rendering delle forme
Il rendering delle forme con le HLAPI è usato per rappresentare superfici e oggetti solidi. Una forma può essere creata combinando insieme più primitive grafiche come linee e poligoni.
Inizio e fine di una forma
Le forme geometriche vengono specificate attraverso istruzioni OpenGL
racchiuse tra le chiamate a hlBeginShape e hlEndShape. Le HLAPI
catturano tali geometrie per calcolare il rendering aptico.
Identificatori delle forme
Ogni forma deve essere identificata univocamente da un intero che sarà usato dal motore di rendering per i cambiamenti della forma da frame a frame in modo da calcolare correttamente le forze. Tale identificatore può essere rilasciato quando la forma non è più usata.
Depth buffer
La geometria degli oggetti può essere catturata dal depth buffer usato
dalle OpenGL: quando viene richiamata l’istruzione hlEndShape le API
leggono un’immagine da tale buffer, immagine che viene poi passata al
collision thread e usata per calcolare le collisioni con il proxy. Ogni
modifica al depth buffer verrà riconosciuta come modifica di un oggetto
e quindi ne verrà fatto il rendering aptico. Dato che gli oggetti
vengono convertiti in un immagine, è fondamentale utilizzare il punto di
vista corretto durante il rendering, in quanto non è possibile sentire
quelle parti della scena che non sono visibili da tale punto. Esiste la
possibilità di abilitare l’ottimizzazione del punto di vista, con la
quale le HLAPI correggono automaticamente i parametri di visualizzazione
OpenGL in base alla mappatura del dispositivo aptico sulla scena; il
comando corrispondente è
hlEnable(HL_HAPTIC_CAMERA_VIEW)
Grazie al depth buffer è possibile effettuare il rendering aptico e
grafico delle forme in un unico ciclo, semplicemente includendo il
codice di rendering grafico all’interno di un blocco hlBeginShape -
hlEndShape. Se è attiva l’ottimizzazione haptic camera view, tale
metodo non funzionerà in quanto il rendering grafico verrà effettuato
dal punto di vista modificato.
Feedback buffer
Il rendering tramite feedback buffer usa il feedback buffer delle
OpenGL per catturare le primitive geometriche: quando l’istruzione
hlBeginShape viene richiamata, le HLAPI automaticamente allocano tale
buffer e impostano la modalità di rendering OpenGL a feedback buffer;
tutte le primitive vengono così salvate, ma solo i comandi che generano
punti, linee o vertici vengono catturati dalla routine aptica (gli altri
comandi, come quelli relativi all’impostazione delle texture, vengono
ignorati). Con il comando hlEndShape le primitive salvate nel feedback
buffer vengono usate per il rendering aptico. E’ opportuno utilizzare
l’istruzione hlHinti per impostare il numero di vertici che saranno
presenti nella scena, numero che verrà usato dalle HLAPI per allocare la
memoria per il feedback buffer; ad esempio il comando seguente alloca
memoria per 4 vertici:
hlHinti(HL_SHAPE_FEEDBACK_BUFFER_VERTICES, 4);
il valore di default è 65536.
Durante la creazione di un oggetto con il feedback buffer è importante
non richiamare l’istruzione glCullFace (o la relativa
abilitazione/disabilitazione) all’interno della coppia di istruzioni
hlBeginShape - hlEndShape, altrimenti può accadere di non essere in
grado di percepire alcune parti dell’oggetto.
Ottimizzazione del rendering
Come nella grafica è possibile ottimizzare il rendering effettuandolo solo sulle forme che vengono visualizzate al momento, è possibile ottimizzare il rendering aptico effettuandolo solo sulle forme che possono essere toccate (ad esempio considerando solo le parti degli oggetti vicini alla posizione corrente del proxy). Di seguito è riportato un elenco delle possibili ottimizzazioni che possono essere effettuate.
-
Adaptive Viewport: Tale ottimizzazione consiste nel limitare la regione del depth buffer che viene letta nella memoria per il rendering aptico all’area prossima alla posizione corrente del proxy. L’incremento di prestazioni dipende dalla velocità con la quale la scheda grafica riesce a leggere il depth buffer dalla memoria. Il comando per abilitare tale opzione è
hlEnable(HL_ADAPTIVE_VIEWPORT). Per utilizzare l’adaptive viewport la scena deve essere ridisegnata regolarmente quando il dispositivo aptico è in movimento, ad una frequenza tanto più alta quanto più veloce è il movimento del dispositivo. -
Haptic Camera View: Con tale opzione attivata, le HLAPI modificano automaticamente i parametri di visualizzazione usati per il rendering del depth buffer o del feedback buffer, in modo tale che solo le forme vicino alla posizione attuale del proxy vengono visualizzate. Nel caso venga utilizzato il feedback buffer, tale tecnica può portare ad un incremento delle prestazioni in quanto viene ridotto il numero delle primitive geometriche prese in considerazione dal rendering aptico (l’incremento effettivo dipende dalla densità degli oggetti presenti sulla scena). Nel caso invece di utilizzo del depth buffer l’incremento sarà di minore entità, in quanto il rendering aptico del depth buffer è indipendente dal numero di primitive; inoltre l’immagine generata dal depth buffer è solo un sottoinsieme dell’intero buffer ed è possibile sentire parti degli oggetti che non sono visibili dal punto di vista grafico. Come per l’adaptive viewport, l’abilitazione dell’opzione haptic camera view richiede che la scena venga ridisegnata ad una frequenza proporzionale alla velocità di movimento del dispositivo. L’utilizzo di questa opzione disabilita l’adaptive viewport.
-
Culling con partizioni spaziali: Quando nella scena sono presenti degli oggetti costituiti da un numero molto grande di primitive il culling può diventare molto costoso in termini di risorse di calcolo; usando strutture particolari (come alberi binari) è possibile effettuare il culling di molte primitive in un’unica operazione. Per prima cosa è necessario determinare la regione dello spazio che viene presa in considerazione per il rendering aptico; tale regione è semplicemente quella che viene impostata dalle HLAPI nella chiamata a
hlBeginShapequando è abilitata la haptic camera view. Una volta individuata la regione, si utilizzano delle partizioni dello spazio per trovare il sottoinsieme di primitive che si trovano all’interno (completamente o parzialmente) di essa; tali geometrie vengono visualizzate tramite OpenGL.
In conclusione, se si lavora con un numero elevato di primitive è conveniente utilizzare il depth buffer mentre, al contrario, è conveniente utilizzare il feedback buffer se il numero di primitive è ridotto.
Il depth buffer è meno accurato del feedback buffer, anche se tale differenza non è percettibile: con il depth buffer infatti le forme vengono trasformate in un’immagine bidimensionale prima di calcolarne il rendering aptico, e tale trasformazione comporta una perdita di informazioni. L’opzione haptic camera view permette di individuare una vista che minimizzi la perdita di dettagli dell’immagine, anche se non sempre è possibile catturare tutte le informazioni. Se vengono usate linee o punti come vincoli, deve essere usato il feedback buffer in quanto tali primitive non possono essere catturate dal depth buffer.
Mappatura del dispositivo aptico sulla scena
Di seguito viene descritto come i movimenti del dispositivo aptico vengono tradotti in movimenti nella rappresentazione grafica.
Lo spazio di lavoro aptico
Lo spazio di lavoro aptico è lo spazio che può essere raggiunto dal dispositivo aptico, e le dimensioni (in millimetri) di tale spazio possono essere ottenute con il comando
HLdouble workspaceDims[6];
hlGetDoublev(HL_WORKSPACE, workspaceDims);
Si può scegliere di non utilizzare l’intero spazio di lavoro scegliendo
la porzione utilizzabile con la chiamata a hlWorkspace.
Stack di matrici
Sono previsti due stack di matrici 4x4 tramite le quali viene effettuata
la mappatura: HL_VIEWTOUCH_MATRIX e HL_TOUCHWORKSPACE_MATRIX. Mentre
il primo ha la funzione di definire una mappatura tra lo spazio di
lavoro e le coordinate visive, il secondo serve ad orientare lo spazio
di lavoro secondo le coordinate visive.

Le coordinate globali vengono prima trasformate nelle coordinate locali (le coordinate della vista corrente); successivamente si ottengono le coordinate di tocco, le quali rappresentano la base della mappatura dello spazio di lavoro sulle coordinate della vista corrente. Infine l’ultima trasformazione porta ad ottenere le coordinate dello spazio di lavoro (coordinate locali del dispositivo aptico).
Il funzionamento dei due stack è analogo a quello delle OpenGL: le HLAPI mantengono uno stack corrente e tutte le operazioni hanno effetto su questo.
Proprietà dei materiali ed effetti aptici
Controllando le proprietà dei materiali si controllano le proprietà
tattili della superficie, analogamente a come vengono controllate le
proprietà visive. Il comando per specificare tali proprietà è
hlMaterial, e può essere applicato al fronte o retro della superficie
o ad entrambe le facce.
-
Rigidità: La rigidità di una superficie viene impostata tramite il comando
hlMaterialf(HL_FRONT_AND_BACK, HL_STIFFNESS, 0.7)dove lafaggiunta indica che il parametro numerico è un float. Matematicamente rappresenta il tasso con il quale la forza aumenta mano a mano che il dispositivo tenta di penetrare la superficie secondo la legge di Hooke \(F=kx\), dove \(k\) è la costante di rigidità e \(x\) è il vettore rappresentante la penetrazione. -
Smorzamento: Impostando tale proprietà tramite il comando
hlMaterialf(HL_FRONT_AND_BACK, HL_DAMPING, 0.1)viene aggiunta una forza di resistenza dipendente dalla velocità secondo la legge \(F=kv\), con \(k\) costante di smorzamento e \(v\) velocità del dispositivo. - Frizione: La frizione indica la resistenza di un oggetto al movimento laterale
su di esso. Si distingue tra frizione statica e dinamica: la
prima rappresenta la resistenza che si avverte quando il dispositivo
inizia il suo moto sull’oggetto, mentre la seconda indica la
resistenza che si avverte quando il dispositivo è in movimento
sull’oggetto. Si può pensare al ghiaccio come esempio di materiale
dotato di un’alta frizione statica ma bassa frizione dinamica; la
gomma invece ha coefficienti elevati per entrambi i tipi di
frizione. Il comando per settare le due proprietà è:
hlMaterialf(HL_FRONT_AND_BACK, HL_STATIC_FRICTION, 0.3) hlMaterialf(HL_FRONT_AND_BACK, HL_DYNAMIC_FRICTION, 0.2) - Vincoli: Sulla superficie possono essere specificati dei vincoli che
costringono il proxy in una determinata posizione (come nella
simulazione di una superficie magnetica). Per attivare questa
modalità è sufficiente eseguire il seguente comando prima della
creazione dell’oggetto:
hlTouchModel(HL_COSTRAINT);per tornare alla modalità di default si richiama nuovamente la funzione
hlTouchModelcon il parametroHL_CONTACT. E’ possibile inoltre impostare il raggio d’azione del vincolo tramite il comando:hlTouchModelf(HL_SNAP_DISTANCE, 1.5);oggi volta che il proxy viene a trovarsi ad una distanza dal vincolo minore del valore specificato da questa istruzione, verrà applicato il vincolo con una forza proporzionale alla distanza.
Per tutte le proprietà il coefficiente varia da 0 a 1. E’ opportuno porre attenzione all’utilizzo di valori troppo elevati in quanto possono causare instabilità del dispositivo.
Eventi
Tramite le HLAPI è possibile associare una funzione al verificarsi di un determinato evento. Ciò avviene eseguendo il comando:
hlAddEventCallback(HL_EVENT_TOUCH, HL_OBJECT_ANY, HL_CLIENT_THREAD, &function, NULL);
in questo modo verrà eseguita la funzione function ogni volta che
un’oggetto verrà toccato. La funzione di callback deve essere
specificata come segue:
void HLCALLBACK function(HLENUM event, HLuint object, HLenum thread, HLcache *cache, void *userdata)
Le callback possono essere associate ai seguenti eventi:
-
Tocco: Un tocco (touch) viene individuato quando il motore di rendering determina un contatto tra il proxy e un oggetto di cui è stato fatto il rendering nell’ultimo frame; se il proxy resta in contatto con l’oggetto, solo il primo istante di contatto viene rilevato come tocco. Analogamente il distacco (untouch) dalla superficie viene rilevato quando il proxy smette di essere in contatto con l’oggetto.
-
Movimento: Il moto viene rilevato come tale quando la posizione o l’orientamento del proxy cambiano. La variazione di movimento e orientamento che viene rilevata come movimento può essere modificata tramite le variabili
HL_EVENT_MOTION_TOLERANCEeHL_EVENT_ANGULAR_TOLERANCE. -
Pulsante: Possono essere associate delle funzioni anche alla pressione dei pulsanti presenti sul dispositivo usando come identificatori per il primo pulsante
HL_EVENT1_BUTTON_DOWN,HL_EVENT1_BUTTON_UPe per il secondo pulsanteHL_EVENT2_BUTTON_DOWN,HL_EVENT2_BUTTON_UP.