ing. Andrea Maglie
La percezione aptica
Disclaimer: Il contenuto di questo post è un estratto della mia tesi di laurea, realizzata nel 2006. Alcuni esempi potrebbero risultare obsoleti, tuttavia la componente teorica resta un buon riferimento per chi deve approcciarsi alla materia.
Il tatto
Il senso del tatto può essere visto come un sistema multisensoriale attivo. Il termine multisensoriale indica che le modalità del tatto riguardano vari sistemi sensoriali, più precisamente:
-
sistema cutaneo;
-
sistema cinestetico;
-
sistema aptico.
Il sistema cutaneo riceve degli input sensoriali dai meccanorecettori (le terminazioni nervose che rispondono a stimolazioni meccaniche) situati nella pelle. Il sistema cinestetico (cioè quella parte del sistema nervoso che si occupa della percezione della posizione e del movimento degli arti) riceve informazioni dai meccanorecettori posti nei muscoli, nei tendini e nelle giunture. Infine, il sistema aptico utilizza le informazioni che provengono da questi due sistemi. Il termine aptico è associato al tocco attivo, e nella vita di tutti i giorni il tocco è proprio di questo tipo: muovendo gli arti e la pelle su superfici ed oggetti, i sensori tattili vengono stimolati, rivelando moltissime importanti proprietà del mondo che ci circonda.
Nel corso degli anni sono state formulate diverse definizioni di tocco attivo o passivo. Secondo Gibson (Gibson, J. J., 1962) il tocco è passivo quando è assente il movimento volontario dei muscoli, mentre il tocco attivo è costituito dall’esplorazione degli oggetti tramite comandi inviati dal cervello ai muscoli. Loomis e Lederman hanno rielaborato il pensiero di Gibson per ottenere una classificazione del sistema sensoriale in base agli input usati; secondo tale classificazione esistono cinque differenti modalità di tocco (Loomis, J. M. & Lederman, S. J., 1986):
-
percezione tattile (cutanea);
-
percezione cinestetica passiva (risposta cinestetica senza movimento volontario);
-
percezione apitca passiva (risposte cinestetica e cutanea senza movimento volontario);
-
percezione cinestetica attiva;
-
percezione aptica attiva.
Solo negli ultimi due casi l’osservatore ha un controllo motorio sul processo di esplorazione tattile.
Un’ulteriore classificazione può essere fatta tra le sensazioni meccaniche del tocco (come pressione e posizione) e le sensazioni legate alla temperatura e al dolore; in tal caso non è diverso solo il tipo di sensazione, ma è diversa anche la tipologia di percezione neurale.
Neurofisiologia del tatto

La pelle è l’organo sensoriale più grande del nostro corpo; nell’adulto medio si estende per circa 2 metri e pesa dai 3 ai 5 chilogrammi. E’ composta di due strati: l’epidermide (la parte più esterna) e il derma (la parte interna); in entrambi gli strati si trovano i meccanorecettori, i responsabili della traduzione degli stimoli meccanici in stimoli neurali. Si può considerare un ulteriore strato compreso tra il derma e i muscoli: l’ipoderma; esso contiene tessuti connettivi e grasso sottocutaneo, oltre alle terminazioni dei meccanorecettori.
La pelle della mano contiene quattro diversi tipi di meccanorecettori, distinguibili in base all’area percettiva e alla risposta agli stimoli.
- Unità ad adattamento veloce –
-
Le unità ad adattamento veloce (FA - fast adapting) mostrano una rapida risposta alle deformazioni della pelle. Se la zona di ricezione degli stimoli è piccola e ben definita si parla di unità FAI, mentre le unità FAII sono costituite da zone ricettive più grandi e con confini poco definiti.
- Unità ad adattamento lento –
-
Le unità ad adattamento lento (SA - slow adapting) esibiscono una risposta continua alle deformazioni sostenute della pelle; le unità SAI hanno una forte sensibilità dinamica e mostrano una risposta irregolare alle stimolazioni sostenute, mentre le unità SAII esibiscono maggiore regolarità nella risposta pur essendo meno sensibili.
Altri tipi di recettori rispondono alle stimolazioni termiche; sono presenti unità di recettori che rispondono al caldo e altre che rispondono al freddo, e tutte sono localizzate nella parte più esterna della pelle. Assieme a questi si trovano anche i recettori del dolore.
I meccanorecettori presenti nei muscoli, nei tendini, nelle giunture e nella pelle delle mani contribuiscono al senso cinestetico di movimento degli arti; le terminazioni di diametro più largo codificano il tasso di cambiamento della lunghezza delle fibre muscolari e le vibrazioni; le terminazioni più piccole sono più sensibili nella fase statica dell’attività muscolare.
Aspetti sensoriali del tatto
Sensibilità e risoluzione
Molti esperimenti sono stati fatti per capire quali sono le soglie di reazione umane alle deformazioni meccaniche della pelle, per poi scalare l’ampiezza delle sensazioni in corrispondenza all’ampiezza degli stimoli e trovare le relazioni tra le reazioni recettive e le caratteristiche degli stimoli alle diverse soglie:
-
La capacità di risoluzione spaziale della pelle è stata misurata come la minima distanza tra due punti tale che questi vengano percepiti come distinti; utilizzando una griglia di punti, la capacità di risoluzione valutata è di circa 1 millimetro.
-
Gli esperimenti sulla capacità di risoluzione temporale, valutata in termini di sensibilità alle vibrazioni, hanno mostrato che gli adulti sono in grado di cogliere vibrazioni fino a 700 Hz, cioè possono distinguere intervalli temporali di circa 1.4 millisecondi. Analizzando invece la capacità di individuare come successivi due impulsi, ciascuno di un millisecondo, si è trovato che i due devono essere separati almeno di 5.5 millisecondi.
Tutto ciò dimostra che la mano ha una capacità risolutiva spaziale migliore dell’orecchio ma minore dell’occhio, mentre per la risoluzione temporale la situazione si inverte, avendosi che la mano è migliore dell’occhio ma peggiore dell’udito.
Effetti della posizione del corpo e dell’età
La sensibilità della pelle varia in base alla parte del corpo che viene stimolata: ad esempio il viso rileva forze di bassa entità, mentre le dita sono più efficienti nell’elaborare informazioni spaziali. Gli effetti dell’età sono stati studiati esaminando le soglie di rilevamento delle vibrazioni: con l’avanzare dell’età queste soglie aumentano, principalmente a causa della perdita di recettori. Lo stesso si verifica per le soglie di rilevamento della densità spaziale; dai 20 agli 80 anni si verifica un aumento di circa 1% all’anno delle soglie di discriminazione della distanza tra due punti e nel rilevamento del loro orientamento rispetto alle dita.
Manipolazioni basate sulla sensibilità
Le informazioni ricevute dalla cute giocano un ruolo fondamentale nell’interazione con gli oggetti. Basti pensare al fatto che le persone dotate di alte soglie di discriminazione tendono ad afferrare gli oggetti con più forza per poterli manipolare; per soggetti con gravi problemi la manipolazione può diventare impossibile.
Afferrare e manipolare un oggetto richiede che la presa e le forze vengano coordinate lungo una sequenza di stadi; i recettori forniscono le informazioni necessarie a dosare e coordinare le forze per compiere queste azioni. Ma le persone non usano solo le informazioni che vengono ricevute istantaneamente dal cervello: vengono sfruttate anche le conoscenze acquisite nelle esperienze passate circa il peso e le altre proprietà degli oggetti. Ciò conduce all’uso di movimenti muscolari già programmati e nell’adattamento di questi alle nuove proprietà degli oggetti manipolati.
Percezione aptica delle proprietà degli oggetti e delle superfici
Secondo Klatzky e Lederman (Lederman, S. J. & Klatzky, R. L., 1999), il sistema aptico inizia l’estrazione di informazioni già a partire dalle unità periferiche (i recettori). Ciò contrasta con il metodo di funzionamento degli organi visivi: la percezione visiva di un oggetto diventa ben definita solo in seguito a varie elaborazioni di alto livello.
Sono state fatte varie distinzioni tra le tipologie di informazioni che possono essere estratte dalla manipolazione di un oggetto o una superficie. Una prima discriminazione è tra proprietà geometriche e proprietà del materiale:
- Proprietà geometriche –
-
Le proprietà geometriche sono specifiche di un oggetto e possono essere divise in dimensione e forma; inoltre possiamo considerare geometrie a livello microscopico e a livello macroscopico. A livello microscopico un oggetto è abbastanza piccolo da ricoprire solo una limitata regione della pelle, come la punta di un dito; ciò produce una deformazione sulla pelle che viene codificata dai meccanorecettori (in particolare dai SAI), ricavando una mappa della disposizione dell’oggetto e le sue profondità. Nel caso macroscopico l’oggetto viene avvolto dalle mani (o dagli arti in generale), raccogliendo informazioni dai sensori cinestetici e da zone della pelle che non sono continue (come le dita); la determinazione della geometria avviene integrando tra loro tutte queste informazioni.
- Proprietà del materiale –
-
Le proprietà del materiale possono essere distinte, secondo Klatzky e Lederman, in tessitura, rigidità, temperatura apparente e peso. Le tessiture comprendono proprietà quali ruvidità, densità spaziale e viscosità. La rigidità non sempre corrisponde alla resistenza che oppone un oggetto (si pensi al tasto di un pianoforte: il tasto è rigido, ma nel momento in cui viene premuto non oppone una forte resistenza fino a quando non viene premuto fino in fondo); ciò significa che in questo caso entrano in gioco sia le informazioni cutanee che quelle cinestetiche.
Ruvidità
Una superficie ruvida è costituita da asperità poste sopra un substrato relativamente omogeneo. La tessitura può essere microscopica o macroscopica: si parla di micro–tessitura se le asperità sono spaziate ad intervalli dell’ordine del millesimo di millimetro; si parla di macro–tessitura se gli intervalli sono di uno o due ordini di grandezza più ampi. Con intervalli oltre i 3–4 millimetri, la superficie non appare più come dotata di tessitura ma come una superficie liscia con delle irregolarità puntuali.
Secondo vari studi, la ruvidità percepita aumenta all’aumentare dello spazio tra le asperità; l’aumento della grandezza delle asperità invece contribuisce a far avvertire la superficie come meno ruvida. La percezione è influenzata anche dalle modalità con le quali questa avviene: l’applicazione di una pressione sulla superficie con le dita porta ad aumentare la ruvidità percepita; anche la diversa velocità di esplorazione porta a considerare diversi livelli di ruvidità. Ciò che invece non influisce è se il controllo è attivo o passivo; quindi le informazioni cinestetiche giocano un ruolo marginale. Secondo il modello formulato da Taylor e Lederman, la percezione della ruvidità è basata sulla complessiva deformazione che lo stimolo provoca sulla pelle; inoltre la deformazione può essere assunta come unidimensionale.
Quando gli stimoli vengono presentati sulla pelle nuda, l’uomo tende a non considerare le vibrazioni nella valutazione delle macro–tessiture (quindi lo spazio tra le asperità e la velocità di esplorazione influiscono minimamente sul giudizio); il contrario avviene nella percezione delle micro–tessiture, per le quali le vibrazioni permettono di discriminare tessiture con asperità comprese tra 0.6 e 1.6 micron spaziate di circa 100 micron.
Peso
Weber nel 1834 notò che un oggetto viene percepito come più pesante quando viene impugnato rispetto a quando viene semplicemente appoggiato sulla pelle, suggerendo che il peso percepito non dipende solamente dal suo valore oggettivo. Successivamente Chapentier e Dresslar (Chapentier, A., 1891) capirono che altri fattori intervengono nella percezione del peso, dato che, tra due oggetti dello stesso peso e diverse dimensioni, quello più piccolo sembra più pesante. Tali osservazioni sono state confermate dai risultati di alcuni studi, secondo i quali la percezione del peso dipende dalla resistenza che questo oppone alla rotazione (in particolare dipende dagli autovalori della matrice di rotazione).
Un altro fattore che influenza questo tipo di percezione è il materiale di cui è costituito l’oggetto: oggetti composti da materiali più densi vengono avvertiti come più pesanti; oggetti più scivolosi necessitano di una presa più forte per essere manipolati, e ciò può condurre ad avvertirli come più pesanti. L’influenza del materiale non è presente tuttavia quando si considerano oggetti di grande massa o quando oggetti di piccola massa vengono impugnati con forza.
In tutte queste percezioni è sempre presente una componente cognitiva, che porta l’uomo ad utilizzare informazioni già acquisite in passato per questo tipo di valutazioni.
Curvatura
Con il termine curvatura si intende il tasso di cambiamento dell’angolo della tangente ad una curva al variare del punto per il quale passa la tangente. La percezione della curvatura viene influenzata da eventuali altre superfici toccate in precedenza, oppure dal fatto che la curvatura sia orientata lungo le dita, che tocchi il palmo o il dorso della mano.
Durante l’esplorazione di una superficie curva, l’informazione più importante (quella che viene valutata di più nella determinazione del livello di curvatura o nella distinzione tra oggetti curvi e oggetti piani) è data dalla differenza nelle posizioni relative delle dita.
L’esplorazione manuale nella percezione delle proprietà degli oggetti
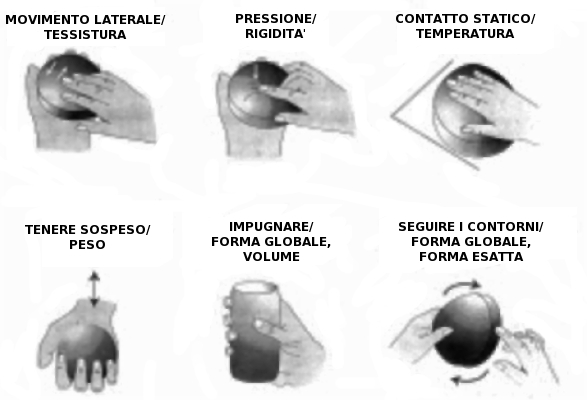
Lederman e Klatzky (Lederman, S. J. & Klatzky, R. L., 1987) hanno individuato l’esistenza di movimenti particolari che vengono eseguiti dalle persone nell’esplorazione delle proprietà di un oggetto, e ogni tipo di proprietà è associata ad una diversa procedura di esplorazione:
-
il movimento laterale è associato all’esplorazione delle tessiture;
-
con il contatto statico si cerca di massimizzare la zona di contatto con la superficie per individuarne la temperatura;
-
impugnare un oggetto serve per capire a grandi linee la sua forma e il suo volume;
-
esercitare una pressione fornisce informazioni sulla resistenza di un oggetto;
-
tenere in mano l’oggetto dà informazioni circa il suo peso;
-
l’esplorazione dei contorni serve a individuare i contorni precisi (e quindi la forma precisa) dell’oggetto in esame.
Percezione aptica dello spazio
Non esiste ancora una definizione universalmente accettata di spazio aptico; Lederman, Klatzky, Collins e Wardell (Lederman, S. J., Klatzky, R. L., Collins, A., & Wardell, J., 1987) hanno introdotto una distinzione tra lo spazio che viene raggiunto ed esplorato dalle mani e lo spazio che viene esplorato tramite movimenti del corpo. Il primo tipo di spazio si può definire spazio manipolatorio.
La percezione aptica dello spazio è anisotropica, in quanto non è possibile applicare una metrica alle percezioni di questo tipo: esse risultano distorte rispetto alla realtà e non sono uniformi lungo lo spazio esplorato. Un primo tipo di distorsione è costituito dall’illusione verticale–orizzontale: la lunghezza di linee verticali viene sovrastimata rispetto alle stesse poste in orizzontale. Tale illusione è stata riscontrata sia in soggetti ciechi che in soggetti senza problemi di vista (quindi non è dovuta a illusioni visive) ed è fortemente influenzata dal movimento delle braccia usato durante l’esplorazione (dipende quindi dalla distanza relativa tra soggetto e oggetto esaminato).
Un altro tipo di illusione riguarda il movimento radiale o tangenziale: i movimenti radiali (verso il corpo e lontano dal corpo) tendono a dare un giudizio sovrastimato rispetto ai movimenti tangenziali di uguale estensione. Anche in questo caso è forte l’influenza della posizione degli arti; ad esempio una distanza percepita è più grande se la mano si trova vicina al corpo.
Il terzo tipo di illusione riguarda l’orientamento obliquo: riprodurre l’orientamento di un’asta è più difficile quando questa è obliqua (a 45 gradi ad esempio). Si è visto inoltre che l’effetto è maggiore quando è presente la forza gravitazionale rispetto a quando questa viene annullata con dei pesi che la controbilanciano; infatti, se l’asta è posta sul piano orizzontale, l’effetto non si presenta.
Percezione di pattern bidimensionali e tridimensionali
Di seguito sono riportati i risultati di vari studi eseguiti su diversi tipi di pattern aptici.
- Pattern vibrotattili –
-
Un pattern vibrotattile viene generato stimolando una parte del corpo (usualmente le dita) tramite un insieme di punti di contatto. I punti di contatto sono costituiti da una matrice di spilli che vibrano circa 230 volte al secondo; le righe sono distanti tra loro circa un millimetro mentre le colonne circa $2.5$ millimetri. Due pattern che vengono presentati ad una certa distanza temporale tra loro possono sommarsi formando un nuovo pattern o produrre due distinte risposte; tali effetti si verificano anche se i pattern vengono presentati allo stesso istante su dita diverse della mano. Le interazioni spaziali si verificano se il pattern stimola aree comuni della pelle o quando provocano uno stesso tipo di reazione su zone diverse della pelle; l’abilità di discriminare i pattern è inversamente proporzionale all’area di pelle che viene stimolata da tutti i pattern.
- Pattern bidimensionali e forme libere –
-
I pattern bidimensionali sono composti da un insieme di sporgenze lineari o puntuali, come ad esempio il Braille. I meccanorecettori coinvolti principalmente nella percezione di queste trame sono i SAI, i quali agiscono su piccole aree e quindi sono più sensibili alle discontinuità di una superficie, e insieme producono una risposta che preserva la forma della superficie stessa. Se i pattern bidimensionali rappresentano oggetti reali, il riconoscimento di questi è guidato in gran parte dalle conoscenze visuali che si posseggono dell’oggetto in esame.
- Oggetti tridimensionali –
-
Contrariamente alle riproduzioni bidimensionali, gli oggetti reali vengono riconosciuti molto bene al tatto. Una causa di ciò è che nella riproduzione bidimensionale viene eliminata una dimensione, la profondità, la quale può essere ricostruita tramite la vista ma non tramite il tocco. L’esplorazione solitamente inizia con l’individuazione delle caratteristiche locali, per poi passare all’estrazione delle caratteristiche globali dell’oggetto. Oggetti simili nella forma ma con diverse caratteristiche locali vengono tendenzialmente giudicati come diversi se l’esplorazione è aptica, mentre con l’esplorazione visiva vengono giudicati simili; il risultato dell’esplorazione aptica si avvicina a quello dell’esplorazione visuale man mano che il tempo di analisi dell’oggetto aumenta. Inoltre sembra che le persone tendano ad esaminare la parte frontale di un oggetto se viene usa la vista, mentre in un’analisi aptica si considera maggiormente la parte posteriore (quella che più spesso viene esplorata con le dita).
Sono stati eseguiti degli studi anche sull’interazione tra percezione aptica e percezione visuale, allo scopo di verificare se l’attenzione del soggetto viene rivolta automaticamente verso una certa zona dello spazio o piuttosto viene attirata da degli stimoli. Se vengono stimolati entrambi i sensi (tatto e vista) concordemente, allora l’attenzione può essere rivolta spontaneamente sia nella modalità visiva che nella modalità aptica; al contrario, una stimolazione visiva incongruente con quella aptica può condurre ad una direzione errata dell’attenzione aptica. Tale effetto è dovuto alla dominazione del senso della vista sul senso del tatto e dipende dall’età del soggetto (all’aumentare dell’età aumenta il ruolo del tatto) e dalla sua esperienza.
Memoria aptica
Nello studio della memoria umana è sempre stata data molta importanza agli effetti degli stimoli visivi e uditivi; d’altro canto lo studio della memoria aptica viene reso più difficile dal fatto che gli stimoli aptici possono essere facilmente modulati da quelli visivi (oppure da una memoria visiva).
Secondo Millar (Millar, S., 1999), esiste nell’uomo una memoria aptica che è a breve termine e si limita a ricordare due o tre oggetti. Quando vengono raccolte informazioni tramite il tatto, la loro rappresentazione in memoria può essere intrinseca a questa modalità o più generica. Ad esempio nell’esplorazione di piccoli pattern come il Braille o altre tessiture, la rappresentazione avviene in termini di proprietà aptiche; se invece i pattern possono essere organizzati secondo strutture spaziali, le informazioni su queste strutture vengono memorizzate assieme alle informazioni puramente aptiche. La rappresentazione aptica è intramodale anche nel senso che tali informazioni possono essere usate non solo dal tatto ma anche dalla vista; infatti spesso i pattern esplorati apticamente vengono poi riconosciuti alla vista.
I bambini riescono a discriminare quasi sempre gli oggetti che vengono loro presentati sia utilizzando sempre una stessa modalità di analisi (solo aptica o solo visiva), sia utilizzando modalità diverse (a volte aptica, a volte visiva). L’accuratezza di questi riconoscimenti tuttavia decrementa se vengono analizzati oggetti non conosciuti; si pensa che questo dipenda dal fatto che i soggetti effettuano una categorizzazione aptica degli oggetti in base alle loro proprietà e alla disponibilità o meno di una percezione visiva degli stessi.
La memoria umana può essere esplicita o implicita: la differenza tra le due è che nell’uso della memoria esplicita il soggetto volontariamente ricerca informazioni tra i suoi ricordi. La memoria aptica può essere sia implicita che esplicita, ma con modalità diverse rispetto alla memoria visiva.
Feedback aptico
Se si pensa al principio di azione–reazione di Newton, si capisce come in natura non esiste il concetto di feedback aptico. Le variabili intensive (come la forza) descrivono in modo astratto le interazioni, mentre le variabili estensive descrivono lo stato del fenomeno osservato, e non è possibile eseguire una separazione di questi due tipi di variabili; le forze sono individuabili attraverso i loro effetti sullo stato del fenomeno e tali effetti non sono necessariamente gli stessi per fenomeni sotto la stessa influenza.
Non si può parlare quindi di feedback aptico nell’interazione tra oggetti fisici, ma solo nell’interazione uomo–uomo o uomo–macchina. Sia l’uomo che le macchine infatti possono essere visti come formati da sensori e attuatori (gli oggetti invece costituiscono entità non separabili da questo punto di vista). Come abbiamo visto, nell’uomo esistono vari tipi di recettori che raccolgono le informazioni e le trasmettono al cervello; per quanto riguarda le macchine invece è evidente che, per poter ricevere e trasmettere una forza, devono essere equipaggiate con sensori e attuatori artificiali. Come vedremo nel capitolo dedicato ai dispositivi aptici, i dispositivi e le interfacce aptiche posseggono queste caratteristiche.
Riferimenti
- Gibson, J. J. (1962). Observation On Active Touch. Psychological Review, 69, 477–490.
- Loomis, J. M., & Lederman, S. J. (1986). Tactual perception. Handbook of Perception and Human Performances, 2, 31–41.
- Lederman, S. J., & Klatzky, R. L. (1999). The haptic glance: A route to rapid object identification and manipulation. Attention and Performance, 17: Cognitive regulation of performance: Interaction of theory and application, 165–196.
- Chapentier, A. (1891). Experimental study of some aspects of weight perception (Vol. 3, pp. 122–135). Archives de Physiologie Normales et Pathologiques.
- Lederman, S. J., & Klatzky, R. L. (1987). Hand movements: A window into haptic object recognition. Cognitive Psychology, 19, 342–368.
- Lederman, S. J., Klatzky, R. L., Collins, A., & Wardell, J. (1987). Exploring environments by hand or foot: Time-based heuristics for encoding distance in movement space. Journal of Experimental Psychology: Learning, Memory and Cognition, 13, 606–614.
- Millar, S. (1999). Memory in Touch. Psicothema, 11, 747–767.